
Large Robot Controls
Inertial Force Active Damping Control
Inertial force active damping controller is developed for the robotic system to clean up underground nuclear waste tanks. The controller uses real-time measurements of macro manipulator's structural vibration, adjusts the motion of the micro manipulator and counteracts to suppress the vibration. Its effectiveness was semonstrated on a micro/macro flexible link manipulator testbed with an industrial robotic manipulator.
- Schilling on the flexible link (video)

Adaptive Trimming with Flexible Fixtures
Adaptive trimming robotic system is built for manufacturing of AirBus 350 composite stringers. The system consists of 40 industrials robots and a large gantry robot(80'x10'x5'), trimming parts based on the real time scanned data - delivering overall 3X process cycle time improvement and 90% waste reduction.


Multi-Modal Control of Cable Robots
A multi-modal controller for 6 cables-driven robots is developed for Fukushima and Chernobyl nuclear disaster clean up, and commercial port crane application. The multi-modal controller enables the cable robots to deploy deeper and move safely by minimizing its lateral vibrations.

Input Shaping Control of Work Platform/Overhead Crane
An input shaping control method is implemented to a robobotized Snorkel work platform (hydraulics) and a commercial overhead crane (AC motors). Two systems demonstrated successfully 90%+ vibration reduction with improved robustness.


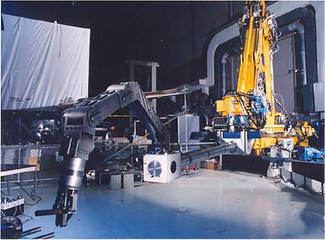
Bracing Micro-Macro Manipulator Control
A concept of micro-macro manipulors bracing on the fixed structure is developed and demonstrated here. The bracing strategy is to provide additional structural stability to the micro manipulator attached on the macro so that they can have longer reach and perform finer tasks. Its application is intended for space station maitenance and nuclear waste tank maintenance. The testbed consists of two links hydraulic maniputor (17' reach) as the macro and two links motor-driven manipulator (4' reach) as the micro.
Vehicle Stability Control

Vehicle Yaw Control with Center Coupler
Center couplers are often used to provide better traction control for part time 4x4 vehicles by transfering engine torque between the front and rear wheels. Also, a careful real-time control of the front-rear torque transfering could change the vehicle dynamics inducing over and under-steering. A prototype center couper wasinstalled on Volvo XC90, and its real-time control was demontrated on a T-junction scenario.


Rollover Mitigation with Actively Controlled Limitted Slip Differential
Vehicle rollover has the highest fatality rate among non-collision vehicle crashes. A control scheme for electronically controlled limited slip differentials is developed to prevent the vehicle rollover. Its effectiveness on dynamic rollover propensity is measured by meeting the National Highway Traffic Safety Administration's Fishhook test. A prototype system was installed on HUMVEEs and demonstrated successfully.
Torque Vectoring for Active Vehicle Stability Control.

An control algorithm is developed for four wheels torque vectoring systems (front-rear and side-to-side torque transfering) to improve the vehicle handling. Doublie lane change mauever with a steering robot was performed on the winter slippery roads, demonstrating improved neutral steering propensity.
Advanced Robotics

Bilateral Teleoperation with Time Delay
In teleoperation, a time delay in communication may not be avoidable when its physical distance is far apart or its bandwidth is limitted. The time delay in bilateral force-reflective teleoperation (e.g. tele-surgery) could easily induce the overall system instability. A passivity based controlled is proposed and demonstrated on a physical force reflective joystick driving a virtual robot with time delay.

Omni-Directonal Mobile Robot Control
An omni-directional robot is developed for RoboCup competition - robots playing soccer. Its basic motion controller is demonstrated here.

Visual Servo Control
A robot catching a randomly moving toy-car is demonstrated here using a overhead vision camera. This was not too bad in 2000.
Smartphone-Based Mobile Robot
Developed smartphone-based robots for tele-presence and home monitoring via WebRTC technology.
- video link